
Hace un año, Un buen amigo y destacado agrimensor, compartió cinco temas relacionados y de tendencia de innovación; hoy, luego de un análisis, me permito compartirles este interesante tópico.
Los Sistemas Globales de Navegación por Satélite (GNSS), como GPS, Galileo, GLONASS y BeiDou, se han convertido en la columna vertebral de la navegación global, el transporte autónomo y la sincronización de infraestructuras críticas (redes eléctricas y telecomunicaciones).
Sin embargo, las señales civiles de espectro ensanchado por secuencia directa (DSSS) no están cifradas ni autenticadas, y su nivel de potencia al alcanzar la Tierra es extremadamente bajo (aproximadamente -160 dBW). Esta debilidad estructural expone a los receptores a interferencias intencionadas.

La suplantación de señales GNSS (spoofing) es una técnica de ataque avanzada en la que un falsificador genera y transmite señales de radiofrecuencia (RF) falsas que imitan fielmente a la constelación real. A diferencia del bloqueo de señal (jamming), que simplemente satura el espectro con ruido para anular el servicio, el spoofing busca engañar sutilmente al receptor.
Su objetivo es alterar el cálculo de la Posición, Velocidad y Tiempo (PVT) del objetivo sin activar las alarmas del sistema. Los ataques se clasifican en:
1️⃣ Asíncronos: El atacante inyecta señales con un desfase temporal notable, provocando que el receptor pierda el enganche con los satélites reales y reajuste sus bucles de seguimiento hacia la señal falsa.
2️⃣ Síncronos: El atacante alinea milimétricamente las fases de código y frecuencias de las señales falsas con las auténticas, para luego aumentar gradualmente la potencia, tomar el control de los bucles de seguimiento y desplazar al receptor hacia una posición falsa de manera imperceptible.
️ Defensa en la Capa Física: Procesamiento Digital de Señales (DSP)
La primera línea de defensa ocurre inmediatamente después de la digitalización de la señal en el front-end de radiofrecuencia, dentro de la etapa de Procesamiento Digital de Señales (DSP).
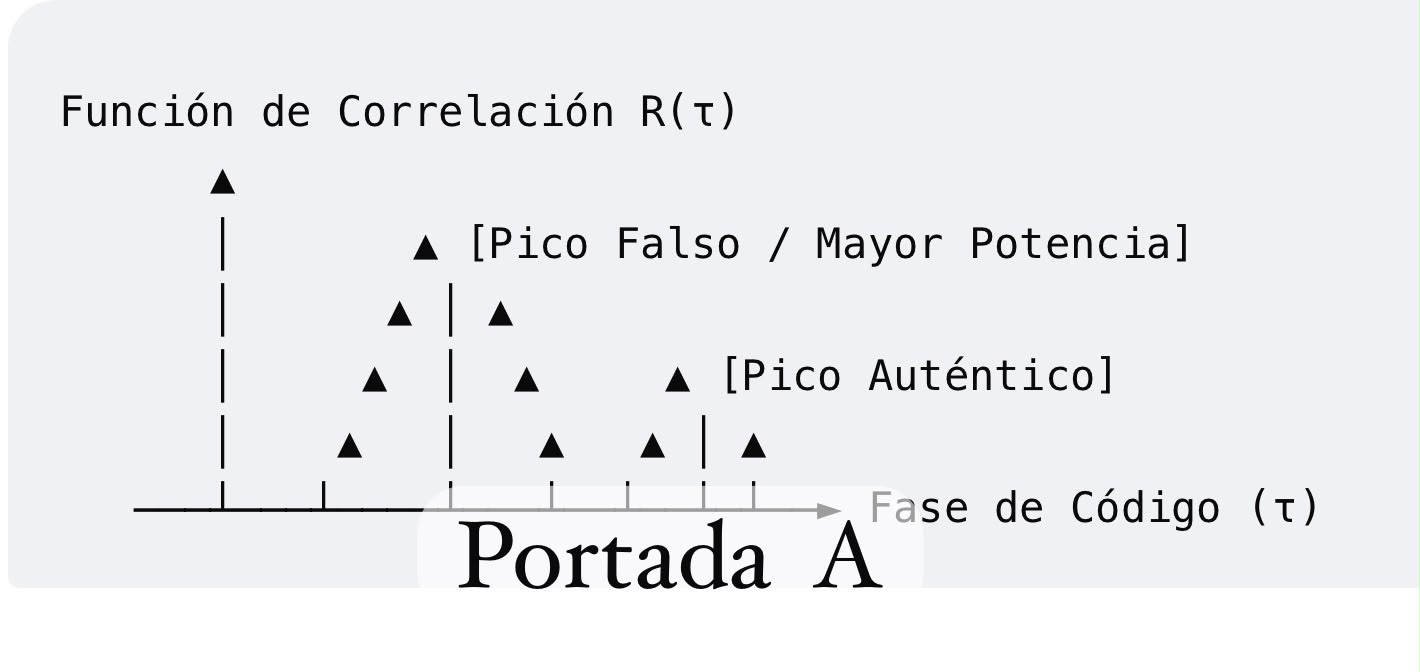
En un receptor convencional, la señal entrante se correlaciona localmente con una réplica del código de ruido pseudoaleatorio (PRN) del satélite. Bajo condiciones normales, la función de correlación exhibe un único pico nítido. Durante un ataque de suplantación, especialmente uno de tipo síncrono, emergen múltiples picos de correlación en el canal digital del receptor: uno correspondiente a la señal auténtica y otro a la señal suplantada.
Ver portada, identificada con la letra A.
Los algoritmos DSP avanzados implementan técnicas de Discriminación y Rechazo Activo de Picos:
Monitoreo de la Relación Señal-Ruido (\(C/N_0\)): Un incremento abrupto o fluctuaciones anómalas en la densidad de potencia de la señal delatan la inyección de RF artificial.
Correladores Múltiples (Multi-correlator Banks): En lugar de utilizar los tres correladores estándar (Early, Prompt, Late), el DSP despliega decenas de correladores espaciados estrechamente para mapear la forma exacta de la función de correlación. Si se detecta una distorsión o asimetría estructural provocada por el pico del atacante, el algoritmo DSP aísla el canal.
Bucles de Seguimiento Robustos (MET – Multipath Elimination Technology): Se adaptan algoritmos tradicionalmente usados para mitigar el multitrayecto con el fin de cancelar matemáticamente la componente de señal espuria con mayor potencia, manteniendo el enganche de fase exclusivamente en la señal legítima remanente.
️Verificación en la Capa de Navegación: Algoritmos RAIM
Si la señal suplantada logra evadir los filtros DSP de la capa física e ingresa a las ecuaciones de navegación, la defensa se traslada a la validación de consistencia matemática mediante el Monitoreo Autónomo de la Integridad del Receptor (RAIM).
RAIM aprovecha la redundancia geométrica de la constelación. Para calcular una posición tridimensional y el sesgo del reloj del receptor, se requieren un mínimo de 4 satélites. Cuando el receptor rastrea un número mayor de satélites (\(N \ge 5\)), el sistema se vuelve sobredeterminado, permitiendo la detección de fallos.
El algoritmo RAIM opera bajo el principio de consistencia en el dominio de las pseudodistancias. Su funcionamiento se desglosa en los siguientes pasos:
1️⃣ Cálculo de Residuos: Se estima la posición del receptor mediante mínimos cuadrados o un Filtro de Kalman utilizando todas las mediciones disponibles. El vector de residuos de pseudodistancia \(r\) se define como:
r = y – Hx
Donde (y)es el vector de mediciones, (H) es la matriz de observación geométrica y (x) es el estado estimado de posición y tiempo.
2️⃣ Prueba Estadística (Detección de Fallos): Se calcula la suma de los residuos al cuadrado (SSE), la cual sigue una distribución Chi-cuadrada (x2).Si el valor acumulado supera un umbral estadístico predefinido (basado en la probabilidad admisible de falsas alarmas), RAIM determina la presencia de una anomalía o ataque de suplantación en curso.
3️⃣ Aislamiento y Exclusión del Satélite ( N>=6):Si se detecta un fallo, algoritmos avanzados como FDE (Fault Detection and Exclusion) evalúan de forma iterativa subconjuntos de satélites. Al identificar cuál de las mediciones incrementa desproporcionadamente el vector de residuos, el satélite suplantado es excluido de forma automática del cómputo de la solución fotogramétrica, preservando la continuidad del guiado seguro.

Verificaciones de Coherencia de Posición
El atacante puede interceptar y suplantar toda la constelación visible de manera simultánea para que los residuos de RAIM se mantengan artificialmente bajos y coherentes entre sí. Para Neutralizar este escenario avanzado, se aplican Verificaciones de Coherencia de Posición.
Esta técnica evalúa la factibilidad física y dinámica de la solución PVT calculada frente a modelos cinemáticos previos o sensores complementarios:
Filtros de Validación Cinemática: Un receptor real instalado en un vehículo posee límites físicos de aceleración, velocidad y tasa de giro (jerarquía dinámica). Si el ataque genera saltos instantáneos de posición —incluso de unos pocos metros entre épocas de muestreo consecutivas— o velocidades que contradicen las leyes de la inercia, la solución GNSS se etiqueta inmediatamente como «no confiable».
Hibridación GNSS/INS (Sistemas de Navegación Inercial): Es la defensa más robusta en esta capa. Las Unidades de Medición Inercial (IMU) basadas en acelerómetros y giroscopios son inmunes a las interferencias de radiofrecuencia. El receptor contrasta continuamente la aceleración y orientación medidas por la IMU con los datos derivados de las pseudodistancias GNSS. Si el generador de spoofing intenta desviar la posición calculada por el GNSS mientras la IMU reporta un estado estacionario o de movimiento rectilíneo uniforme, la discrepancia matemática delata instantáneamente la suplantación.
Robustecimiento del Proceso de Adquisición: Limitación de la Ventana de Búsqueda de Satélites
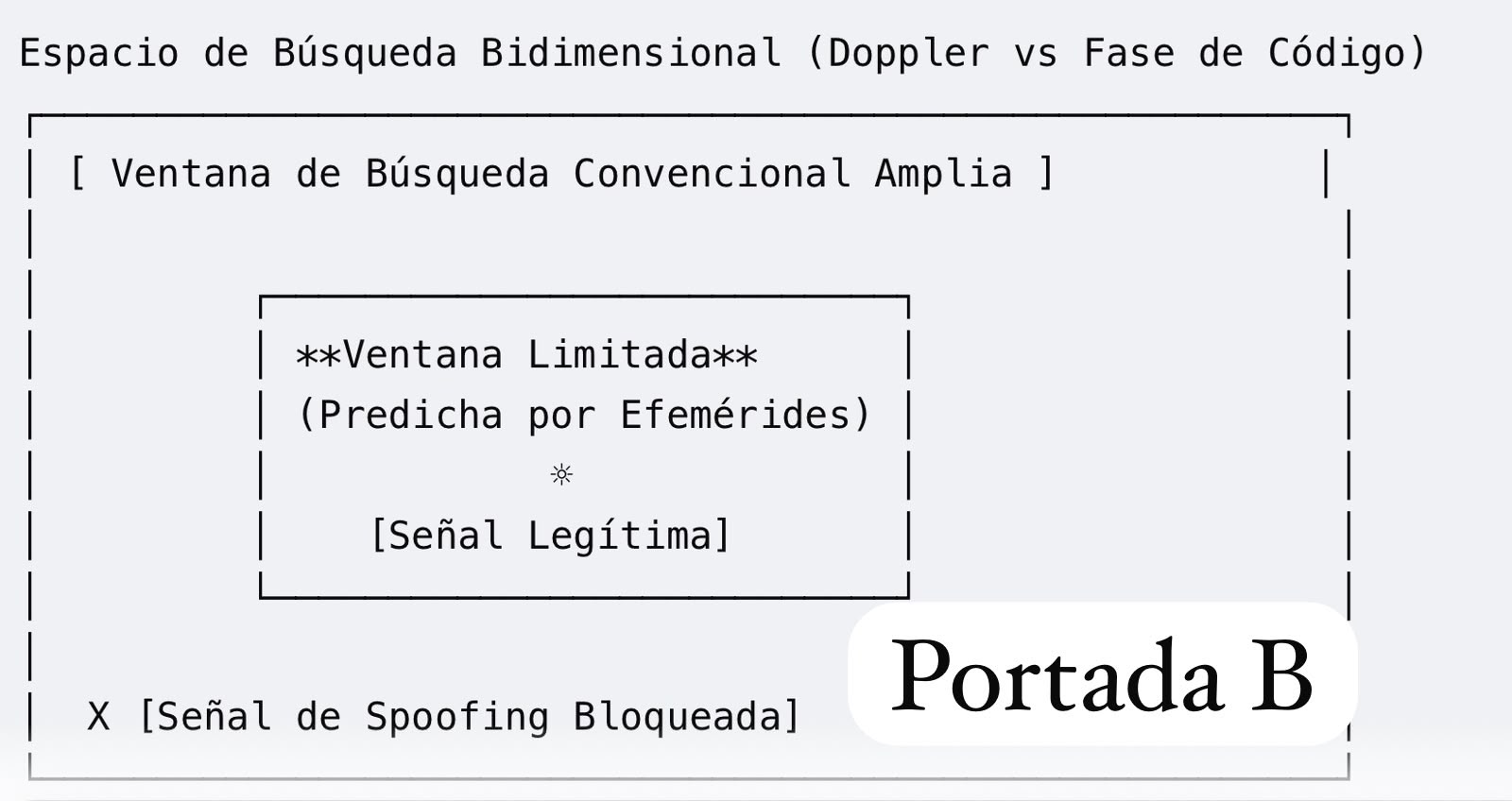
Durante la fase de encendido o tras una pérdida de señal, el receptor entra en modo de adquisición. Tradicionalmente, examina un rango extenso en un espacio de búsqueda bidimensional: la fase de código del chip PRN y el desplazamiento de frecuencia Doppler ocasionado por el movimiento relativo entre el satélite y el receptor.
Un atacante asíncrono aprovecha este estado inyectando señales con potencias elevadas dentro de cualquier región del espacio de búsqueda para forzar al receptor a capturar los canales maliciosos. La Limitación de la Ventana de Búsqueda de Satélites contrarresta esta vulnerabilidad estrechando proactivamente los márgenes de captura:
Ver portada, identificada con la letra B
Mediante el almacenamiento local de efemérides válidas y precisas junto con un reloj interno calibrado (o un oscilador de alta estabilidad), el receptor calcula de forma predictiva el rango exacto de valores Doppler y la fase de código esperados para cada satélite visible en una coordenada geográfica aproximada.
Al restringir y bloquear las compuertas de búsqueda a estos rangos matemáticamente viables, cualquier señal de suplantación que intente penetrar los bucles de seguimiento desde valores de frecuencia o tiempos desalineados con la órbita real es rechazada de manera automática antes de iniciar la correlación.
Luego de llegar hasta aquí, surge una pregunta:
¿En qué país se ven más atacado la suplantación de señales para los GNSS geodésico y por qué ?
Actualmente, las zonas geográficas con mayor afectación por ataques de suplantación de señales GNSS(spoofing) lo que impacta severamente al GNSS geodésico y de alta precisión no se limitan a un solo país, sino a regiones geopolíticas calientes que rodean a Rusia (especialmente la región del Mar Báltico y el Mar Negro) y el Medio Oriente (Israel, el Golfo Pérsico y el Estrecho de Ormuz).
Si se tuviera que señalar a los actores estatales que originan o concentran la mayor cantidad de estas transmisiones deliberadas, estos son Rusia e Israel, junto con incidentes masivos reportados en las fronteras de China, Irán y la frontera de India/Pakistán.
Los principales focos geográficos de ataque.
1-La Región del Mar Báltico y Europa del Este (Originado principalmente por Rusia)
El impacto: Países como Finlandia, Polonia, Estonia, Letonia y Lituania sufren una interferencia constante. Solo en la región del Báltico, los casos de suplantación registrados se dispararon exponencialmente, pasando de aproximadamente 17,000 en 2024 a casi 60,000 incidentes en 2025.
2-Medio Oriente e Israel
El impacto: Toda el área del Mediterráneo Oriental (abarcando el espacio aéreo y marítimo de Israel, Líbano, Chipre y Egipto) experimenta niveles masivos de spoofing. Asimismo, el Estrecho de Ormuz y el Golfo Pérsico registraron en los primeros meses de 2026 ataques masivos donde más de 1,100 barcos en un solo día vieron alteradas sus coordenadas hacia zonas del interior.
3-Zonas de Conflicto en Asia (Frontera India-Pakistán y Mar de la China Meridional)
El impacto: Se ha documentado el uso intensivo de guerra electrónica en las zonas fronterizas de Cachemira y el espacio aéreo de Nueva Delhi. Igualmente, China aplica técnicas similares en aguas disputadas y cerca de sus puertos estratégicos.
¿Por qué se ataca el GNSS y cómo afecta a la geodesia?
El GNSS geodésico utiliza receptores de alta precisión (que miden fases de la portadora milimétricamente) para aplicaciones como la cartografía, la delimitación de fronteras, la deformación de la corteza terrestre y la infraestructura civil. Los ataques ocurren por las siguientes razones:
Estrategia de Guerra Híbrida y Defensa Militar: Los gobiernos emplean el spoofing como un «escudo electrónico». El objetivo principal no es dañar la geodesia civil, sino desviar drones kamikaze, misiles guiados por GPS o aeronaves enemigas hacia ubicaciones falsas.
Protección de Infraestructura Crítica: Ciudades fronterizas u objetivos militares transmiten coordenadas falsas de aeropuertos civiles lejanos (técnica conocida como geofencing spoofing). Esto provoca que las armas automáticas o drones se apaguen o aterricen pensando que están en una zona de exclusión aérea civil.
Vulnerabilidad de las señales civiles: Las señales GNSS abiertas (como el L1 C/A de GPS) viajan desde el espacio y llegan a la Tierra con una potencia sumamente débil. Cualquier emisor terrestre con un equipo de Radio Definido por Software (SDR) de bajo costo puede emitir una señal idéntica pero más fuerte, engañando por completo a los receptores.
Enmascaramiento de Operaciones (Guerra Marítima/Contrabando): En puntos como el Golfo Pérsico o el Mar de la China Meridional, los estados y actores criminales suplantan las señales para alterar los sistemas de posicionamiento de los buques mercantes, ocultando el movimiento real de flotas militares o el contrabando de recursos.
Consecuencia en la Geodesia
Para la geodesia civil, esto genera una pérdida absoluta de integridad en los datos de las estaciones de referencia continua (CORS). Cuando una zona está bajo ataque de spoofing, las coordenadas calculadas por un receptor geodésico sufren saltos repentinos de kilómetros o errores temporales acumulados, inutilizando por completo los levantamientos de alta precisión y obligando a los profesionales a migrar a sistemas de autenticación criptográfica más modernos (como el servicio OSNMA de Galileo).
️ Conclusiones y Trabajo Futuro
La protección absoluta de un receptor GNSS civil frente a ataques de suplantación no puede depender de un único mecanismo aislado. La efectividad de la arquitectura propuesta reside en su enfoque multicapa y autónomo:
1️⃣ El estrechamiento de la ventana de búsqueda impide la captura inicial de señales falsas asíncronas.
2️⃣ Los algoritmos de procesamiento digital de señales (DSP) aíslan y distorsionan los picos de correlación de los atacantes que intentan acoplarse síncronamente.
3️⃣ Los módulos RAIM aseguran la consistencia geométrica interna, descartando satélites falsificados individuales.
4️⃣ Las verificaciones de coherencia cinemática e inercial detienen ataques globales coordinados que pretenden falsificar la trayectoria por completo.
Como trabajo futuro, se plantea la integración de estas técnicas en receptores definidos por software (SDR) de bajo costo, optimizando la carga computacional de los correladores múltiples mediante matrices de puertas lógicas programables en campo (FPGA), garantizando así un blindaje eficiente en sistemas de aviación no tripulada (UAV) y automoción autónoma.
Atentamente,
Ramón Oniel Jiménez Rodríguez (Agrimensor)
Nadie es verdaderamente libre si no se gobierna a sí mismo.
La libertad auténtica no radica en la ausencia de reglas externas, sino en el dominio sobre nuestras propias pasiones y decisiones.
Séneca.