Por Ramón Oniel Jiménez Rodríguez (Agrimensor)

Introducir este tema es un gran desafío al que se enfrentan diariamente los profesionales de la agrimensura. Para nadie es un secreto que una franja de profesionales ha utilizado el mundo GNSS sobre la marcha; sin embargo, el universo comparte poco las vivencias en campo sobre el comportamiento, en ocasiones, de los levantamientos en RTK.
Las vivencias más compartidas son si una CORS está fuera de línea o en funcionamiento o cuando un usuario no logra conectarse, pero nos preguntamos cuáles son los desafíos del día a día en que las estructuras terrestres y satelitales se enfrentan al mundo GNSS.
Existen diferentes foros de agrimensores a nivel nacional e internacional; sin embargo, estos temas son escasos en los debates técnicos entre colegas. ¿Será que se sabe demasiado que es ausente o que existe temor de expresar las inquietudes del día a día en campo?
Sin lugar a dudas, el GNSS, el modo RTK, es el método más utilizado a nivel global por los agrimensores; a lo mejor estoy errado por mi percepción, pero he querido investigar y compartir con ustedes este interesante tema.
En 2026, la infraestructura del Sistema Mundial de Navegación por Satélite (GNSS) enfrenta desafíos cotidianos persistentes derivados de fenómenos naturales, requisitos operativos técnicos e interferencias humanas cada vez más sofisticadas.
1️⃣ Desafíos del segmento espacial y satelital.
Clima espacial: Las tormentas solares severas y el centelleo ionosférico pueden distorsionar las señales al atravesar la atmósfera, causando errores de posición de varios metros. Esto es especialmente crítico en 2026 para sectores de alta precisión como la aviación y el transporte marítimo autónomo.
Protección física y congestión: Los satélites deben soportar temperaturas y radiación extremas mientras navegan en un entorno orbital cada vez más congestionado y lleno de desechos espaciales.
Integridad del reloj y del software: Las constelaciones dependen de relojes atómicos precisos que se degradan con el tiempo. Incluso anomalías de software no maliciosas durante las actualizaciones rutinarias pueden provocar interrupciones globales de varios días.
2️⃣ Desafíos del Segmento Terrestre.
Vulnerabilidades de la Señal (Interferencias y Suplantación de Señales): Los inhibidores de baja potencia y los sofisticados ataques de suplantación de señal son ahora habituales, especialmente en zonas de conflicto y puertos con mucha actividad. Estos pueden provocar que los teléfonos inteligentes reporten posiciones falsas o la pérdida total de la señal.
Cañones Urbanos y Trayectoria Múltiple: En ciudades densamente pobladas, los edificios altos reflejan las señales, creando una «propagación por trayectoria múltiple» que retrasa los datos y provoca errores de posición lateral de varios metros.
Ciberseguridad de las Estaciones Terrestres: Las estaciones de control terrestres son blanco de ciberataques. El malware podría corromper las cargas de datos de navegación, difundiendo coordenadas erróneas a nivel mundial en cuestión de minutos.
⚫️Actualizaciones de Datum: En 2026, cambios importantes como la sustitución del datum horizontal NAD 83 por parte del Servicio Geodésico Nacional requieren que los usuarios de sectores de precisión (por ejemplo, la agricultura) transformen los datos existentes a nuevos marcos de referencia para mantener la precisión.
3️⃣ Obstáculos Operacionales y de Integración.
⚪️Interdependencia: Las redes 5G modernas, los intercambios financieros y las redes eléctricas dependen en gran medida de la sincronización derivada del GNSS. Se estima que una interrupción global de un solo día costará más de 10 000 millones de dólares en 2026.
Demandas de Hibridación: Dado que las señales satelitales son inherentemente débiles, existe un impulso diario para integrar el GNSS con sistemas terrestres de respaldo, como el 5G PNT, las constelaciones LEO y los marcadores RFID, para una navegación fluida en zonas con obstáculos como túneles o instalaciones interiores.
Como podemos comprender, estos son los desafíos del día a día que enfrentan las estructuras satelitales y terrestres para el mundo GNSS o RTK. Esto nos motiva a la siguiente pregunta: ¿estas mismas variables para la exclusividad geodésica y topográfica en el modo RTK?
En 2026, los estudios geodésicos y topográficos que utilizan GNSS cinemático en tiempo real (RTK) enfrentan desafíos operativos y ambientales diarios en infraestructuras terrestres y satelitales.
4️⃣ Desafíos terrestres (infraestructura terrestre).
Obstrucciones de Señal y Cañones Urbanos: Las barreras físicas como edificios altos, valles escarpados y vegetación densa siguen siendo el principal obstáculo para el modo RTK. Estas obstrucciones bloquean las líneas de visión directa a los satélites, lo que a menudo requiere que los receptores multiconstelación más modernos mantengan una solución fija.
Interferencia multitrayecto: Las señales que se reflejan en edificios de cristal, estructuras metálicas o vegetación llegan al receptor con retraso. Esto distorsiona los cálculos de distancia y reduce la precisión centimétrica, especialmente en entornos urbanos.
Fiabilidad del enlace de comunicación: RTK depende de la transmisión constante de datos entre una base y un rover. Los desafíos incluyen:
✳️Alcance de radio: En bases locales, el terreno o la distancia pueden interrumpir las señales de radio.
❎Cobertura NTRIP/Celular: La red RTK (NRTK) requiere una conexión a internet estable. En zonas remotas, una infraestructura celular deficiente puede impedir las correcciones en tiempo real.
Configuración física y sincronización: Los agrimensores deben establecer estaciones base sobre puntos conocidos. Las estaciones terrestres modernas también se enfrentan a problemas de «desviación de tiempo», donde los relojes terrestres deben sincronizarse con osciladores GNSS de alta precisión para mantener la estabilidad de la red.
5️⃣ Desafíos de la estructura satelital.
Interferencia atmosférica: Las señales que pasan por la ionosfera y la troposfera se ven retardadas por la actividad solar y la presión atmosférica. Si bien los motores RTK las modelan para proporcionar correcciones, las perturbaciones atmosféricas severas aún pueden ralentizar la resolución de ambigüedades «sobre la marcha» (OTF).
Geometría de la Constelación (PDOP): El número y la posición relativa de los satélites (DOP) impactan directamente la precisión. En 2026, la proliferación de sistemas LEO (Órbita Terrestre Baja) y multi-GNSS (GPS, Galileo, BeiDou, GLONASS) ayuda, pero la geometría deficiente en valles profundos o bajo la cubierta vegetal aún limita las aplicaciones.
Errores orbitales y de reloj: Incluso pequeñas desviaciones en el reloj atómico de un satélite o en su trayectoria orbital precisa (datos de efemérides) pueden generar errores terrestres significativos: un error de reloj de 10 nanosegundos puede traducirse en una discrepancia de posición de 3 metros si no lo corrige la base RTK.
Amenazas emergentes: Existe una creciente necesidad crítica de defender las señales satelitales contra interferencias, bloqueos y suplantación de identidad, que se han vuelto más sofisticadas en 2026.
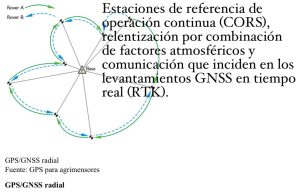
Luego de ver los desafíos del cielo y la tierra en el mundo GNSS, entraremos en materia por las preguntas que nos llevaron abordar este tema y son de las cosas que pasan diariamente y que generan preguntas como la relentisacion en un levantamiento RTK, algo que a simple vista nos llenan de asombro, como un día claro se vuelve pesado el levantamiento, será que a 15km hay cargas de nubes eléctricas donde está ubicada la Cors o es mejor usas otra dentro del rango para ver si mejora el flujo de correcciones en vivo y directo, utilicemos la siguiente vivencia de un levantamiento de campo en RTK, una comprobación de área de 2 mil metros cuadrados en una zona promedio, algunos árboles, cielo semi despejado, nubes gruesas que temporalmente eclipsan el sol, dos Cors del RI prácticamente a la mitad, osea una de la otra a 30 km y en ese intervalo casi a la mitad de la distancia total.
Descripción de la vivencia técnica: Entre las Cors descritas STGO y LVGA, está a una distancia de 15 KM el poblado que está justamente a la mitad de ambas; es a 15 KM en dirección Sur-Este desde Santiago a la Vega y en dirección Norte-Oeste desde la Vega a Santiago.
Entonces nos preguntamos, si ambas CORS son Full GNSS y el receptor móvil también, ¿qué factores inciden para que, conectado de una o de otras, el levantamiento sea más lento, más pesado al momento de levantar estaciones del polígono en RTK? Es algo que a simple vista no se ve, pero que sí tiene una explicación técnica y es lo que estoy compartiendo.
Es común que una CORS (Estación de Referencia de Operación Continua) permanente experimente retrasos en la comunicación o un rendimiento RTK reducido mientras otra estación cercana funciona con normalidad. Esto ocurre debido a factores ambientales específicos del sitio, diferencias de hardware o variaciones en el enlace de comunicación.

¿Por qué varía el rendimiento entre estaciones?
Incluso dentro de un radio estándar, el rendimiento individual de CORS puede variar debido a varios factores:
Multitrayecto y Obstrucciones: Una estación ubicada cerca de superficies reflectantes (techos metálicos, agua o edificios) puede sufrir interferencia multitrayecto, donde las señales reflejadas distorsionan los datos satelitales primarios. Incluso si ambas son GNSS completas, si una estación tiene obstrucciones celestes localizadas (árboles o estructuras), rastrea menos satélites comunes con el rover, lo que reduce la resolución de ambigüedad de enteros.
Interferencia de Radiofrecuencia Localizada (RFI): Una estación puede estar más cerca de fuentes de interferencia artificiales, como torres de televisión, torres de telefonía móvil o radares, lo que puede degradar la calidad de la señal o aumentar el ruido sin afectar a una estación a pocos kilómetros de distancia.
Latencia de la comunicación: Las estaciones CORS envían datos a un servidor central a través de diferentes enlaces de internet o radio. Si una estación depende de una conexión celular o de un ISP congestionada o inestable, la latencia (el retraso entre el registro de los datos y su recepción por el móvil) aumentará, lo que hará que el levantamiento RTK sea lenta o imposible de solucionar.
Versiones de hardware y firmware: Las diferencias en la antena física (por ejemplo, si tiene plano de tierra o radomo) o en el firmware interno del receptor pueden hacer que una estación procese las señales con mayor eficiencia que otra.
Variación atmosférica: Si bien son poco frecuentes en distancias cortas, los eventos atmosféricos intensos y localizados, como los frentes meteorológicos severos o el centelleo ionosférico, pueden afectar la trayectoria de la señal de una estación de forma diferente a la de otra, especialmente si existen diferencias de altitud significativas entre ellas.
Es preciso recordar que, mientras más próximo esté el receptor rover GNSS de la CORS, es mejor por el siguiente planteamiento.

En 2026, el parámetro de distancia entre una estación de referencia de funcionamiento continuo (CORS) y un rover GNSS está determinado principalmente por la precisión horizontal y vertical deseada, y la mayoría de los estándares de calidad recomiendan un alcance máximo de 10 a 20 km para que el RTK de base única mantenga una precisión de nivel centimétrico.
6️⃣Parámetros de distancia
Alcance óptimo (10-15 km): Típico para aplicaciones de alta precisión como la construcción o la agricultura, con una precisión horizontal de aproximadamente 1-2 cm.
⬛️Límite operativo (20-30 km): Aceptado para topografía general, aunque la precisión se degrada a medida que las condiciones atmosféricas varían entre la base y el móvil.
⬜️Alcance extendido (40-60 km): Posible con receptores multibanda modernos o para cartografía catastral de menor precisión (escalas de 1:5000), aunque los errores verticales suelen duplicarse o triplicarse en comparación con los horizontales.
Red RTK (70-100 km): Al utilizar una red de múltiples CORS (NRTK/VRS), se modelan los efectos atmosféricos, lo que permite una distancia entre estaciones de 70 km o más, a la vez que se proporcionan correcciones precisas a un móvil dentro de esa zona.
7️⃣Estándares de Calidad que rigen la medición
Los parámetros de distancia se establecen mediante directrices geodésicas nacionales e internacionales, en lugar de una única ley global. Los estándares clave para 2026 incluyen:
♦️Directrices para el usuario del Servicio Geodético Nacional (NGS): recomiendan límites de referencia para RTK de base única (normalmente entre 10 y 20 km) para gestionar los «errores dependientes de la distancia», como los retrasos ionosféricos y troposféricos.
♠️ Federación Internacional de Agrimensores (FIG): Proporciona estándares técnicos (por ejemplo, Publicación 2019/04) enfatizando que la refracción de la señal atmosférica limita el RTK de base única confiable a aproximadamente 10 a 15 km.
♣️ Normas catastrales locales: muchas jurisdicciones (por ejemplo, SSIR 2012 de Nueva Gales del Sur o las directrices de la Comisión Nacional de Tierras) exigen límites de distancia específicos (por ejemplo, 20 km para una precisión de 2 cm) para certificar los límites legales de propiedad.
♥️ Fórmulas de precisión del receptor: Los fabricantes definen los límites de distancia mediante la fórmula Precisión = [Error fijo] + [ppm × Distancia]. Por ejemplo, 1 cm + 1 ppm significa que un rover a 20 km de distancia tiene un margen de error inherente de 3 cm (1 cm de base + 2 cm de error dependiente de la distancia).
Sobre el tema que nos trajo hasta aquí y que he querido desglosar para un análisis donde se comprenda mejor el mundo GNSS, lo planteado en los párrafos anteriores son datos más teóricos para comprender más detalladamente cómo surge y se combinan cada componente; a continuación, una forma más llana de comprender el funcionamiento diferente de dos estaciones permanentes dentro de rangos o estándares continuos o mismos parámetros.
Sigue siendo común que dos unidades CORS (estación de referencia de funcionamiento continuo) cercanas tengan un rendimiento diferente debido a factores técnicos y ambientales localizados que afectan a una estación pero no a la otra.
⏺️Latencia de la comunicación
Incluso con hardware idéntico, el enlace de datos entre una estación y el servidor central puede causar una comunicación lenta:
♾️Congestión de la red: Una estación en una zona de alto tráfico (por ejemplo, el centro de una ciudad) puede experimentar un rendimiento de datos limitado o una alta latencia por parte de los proveedores locales de telefonía móvil.
〰️Enrutamiento de Internet: Las estaciones rurales o remotas pueden utilizar conexiones de retorno con mayor latencia (como enlaces de microondas o diferentes proveedores de servicios de internet) en comparación con las de los centros bien conectados.
➰Procesamiento del servidor: Si la red utiliza tecnología VRS (estación de referencia virtual), el software central podría experimentar retrasos al procesar los datos sin procesar de una estación específica si su flujo de datos es inconsistente.
⏹️Problemas de hardware y configuración
Problemas con la antena: Una antena dañada o mal instalada, o incluso un cable suelto, puede aumentar el ruido de la señal y ralentizar el tiempo de reparación.
➿Desajustes de firmware: Las diferencias en las versiones de firmware o en la configuración interna del receptor (como las máscaras de elevación) pueden provocar que una estación rastree menos satélites o procese los datos de forma menos eficiente.
✔️Estabilidad del monumento: Pequeños movimientos o vibraciones en un punto específico pueden reducir la fiabilidad de la estación en la red de referencia.
Configuración y Formatos de Mensaje
️️Versión de RTCM: Una estación podría estar enviando mensajes en un formato más pesado (como RTCM 3.2 MSM) que satura un enlace de datos lento, mientras la otra usa un formato más optimizado para tu equipo.
☑️Tasa de Actualización: Si una estación está configurada para emitir correcciones a 1 Hz (una vez por segundo) y la otra a una tasa menor o con irregularidades en el reloj interno, el rover tardará más en sincronizarse.
Es sumamente importante verificar la latencia en tiempo real en tu colector de datos. Si una estación supera constantemente los 2 segundos de latencia, es la causa directa de que el equipo tarde en «fijar» o se mantenga en «flotante».
Para verificar la latencia en tiempo real (a menudo denominada edad de corrección (o Age of Corrections). o edad del enlace de datos) en un recopilador de datos GNSS es un procedimiento estándar para verificar la integridad de las conexiones RTK (cinemática en tiempo real) o NTRIP.
Procedimientos de campo estándar
▶️Trimble Access: Pulse el icono de corrección en tiempo real en la barra de estado (parte superior de la pantalla) o navegue al menú de funciones GNSS. La pantalla «Estado del enlace de datos» mostrará la antigüedad actual de las correcciones en segundos.
⏯️Leica Captivate/Viva: Navegue a la pantalla Configuración de trabajo o Estado. Busque el estado «Enlace de datos RTK» o «Posicionamiento», que muestra el tiempo transcurrido desde la última recepción del paquete de corrección.
⏭️Topcon Magnet Field: Acceda al menú Estado desde la pantalla principal y seleccione Estado GNSS. El campo «Latencia» o «Antigüedad de la corrección» proporcionará el valor en tiempo real.
↔️Universal Field Software (p. ej., FieldGenius): Vaya al menú Instrumento y seleccione Información del sensor o Diagnóstico para ver la antigüedad actual de las correcciones entrantes.
Puntos de referencia de latencia aceptables
La latencia representa el tiempo transcurrido desde que la estación base realizó su observación.
Los siguientes estándares se aplican generalmente a los levantamientos geodésicos y topográficos:
Rendimiento óptimo: de 0,5 a 1,0 segundos. Este es el estándar para el posicionamiento centimétrico de alta precisión.
Rendimiento degradado: de 2,0 a 5,0 segundos. La mayoría de los recopiladores de datos emitirán una advertencia en este nivel. Aún se puede obtener una solución «Fija», pero la precisión disminuirá.
Límite crítico: superior a 10 segundos. La mayoría del software descartará la solución «Fija» y volverá a «Flotante» o «DGPS» porque las correcciones son demasiado antiguas para resolver de forma fiable las ambigüedades de números enteros.
⭕️Términos clave para monitorear
️Antigüedad de la corrección: La antigüedad del paquete de corrección más reciente de la base o red.
️Latencia de la solución: El retraso total entre el evento de medición y la salida en pantalla (generalmente <0,1 segundos para hardware de alta gama).
Límite de propagación RTK: Un ajuste en el estilo de estudio que determina cuánto tiempo el móvil continuará utilizando correcciones antiguas antes de detener las mediciones (el estándar suele ser de 30 a 60 segundos).
Se puede observar que la calidad de los colectores de datos influye en el mosaico de rendimiento y precisión del GNSS.
Para los levantamientos GNSS RTK, el rol del recopilador de datos ha evolucionado de ser un simple dispositivo de almacenamiento a un centro crucial para el procesamiento de alta velocidad, las correcciones en tiempo real y la fusión avanzada de sensores. Las diferencias de rendimiento se basan principalmente en la potencia de procesamiento, la resiliencia ambiental y las tecnologías integradas.
Un colector de alta gama optimiza el flujo de trabajo al procesar grandes volúmenes de datos sin latencia de interfaz, asegurando que la información capturada por receptores avanzados (como los que usan tecnología IMU) sea gestionada con eficiencia.
Hablar de GNSS y RTK son temas con un alto contenido de información siempre actualizada y de gran valor para los profesionales de la agrimensura.
Feliz y bendecido inicio de semana!!!
Grandes bendiciones, éxitos!!!
La felicidad de los que quieren ser populares depende de los demás. La felicidad de los que buscan placer fluctúa con el humor que está fuera de su control. Sin embargo, la felicidad de los sabios viene de sus actos.
Alcanzar la felicidad depende de nosotros mismos y de las decisiones que tomamos en la vida.
Marco Aurelio