
Por Ramón Oniel Jiménez Rodríguez (Agrimensor)
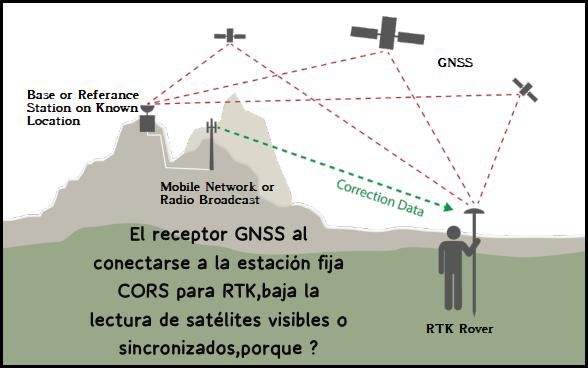
El mundo GNSS, nos invita a profundizar esta tecnología y nos preguntamos, porque al momento de realizar un levantamiento en tiempo real, antes de conectarnos a la estación de referencia (CORS) se visualiza un número X de satélites y al conectarse este se reduce.
La antena GNSS es la responsable del posicionamiento. Para ello, utiliza un sistema de constelaciones de satélites como GPS, Galileo, Glonass y BeiDou. Estos sistemas de satélites envían señales desde el espacio que contienen datos de posicionamiento y de tiempo a su receptor. Su receptor GNSS utilizará estos datos para calcular su posición.
Luego puede transmitir estos datos de posicionamiento a su colector de datos o controladores a través de Bluetooth, cable o Internet, donde se pueden utilizar en su software de topografía.
Ahora que entendemos qué hace la antena GNSS, es bueno entender las diferencias en el rendimiento y de dónde provienen. Para simplificar las cosas, nos centraremos en los componentes principales. No es necesario comprender completamente su funcionamiento, siempre que comprenda los conceptos básicos. Los componentes son:
- Constelaciones de satélites
- Frecuencias
- Canales
- Datos de corrección
1: Constelaciones de satélites
Las constelaciones de satélites que puede utilizar su receptor GNSS juegan un papel importante en la precisión final que puede lograr. Es bastante simple, el cielo está lleno de satélites de posicionamiento como GPS, Glonas Galileo y BeiDou, por lo que cuanto más use, mejor rendimiento obtendrá. Esto es especialmente notable cuando trabaja cerca de obstrucciones como árboles, vallas y edificios, ya que bloquean el camino claro hacia los satélites en su vista.
2: Frecuencias de satélite
Cada satélite de posicionamiento transmite datos a través de múltiples frecuencias. Estas frecuencias son muy importantes para la precisión real que se puede lograr. En resumen, se conocen las características de las frecuencias L1, L2 y L5.
3: Canales del receptor
La cantidad de canales que tiene su receptor GNSS también es importante. Con más de 130 satélites de posicionamiento en órbita, es bueno saber que su receptor puede procesar estos datos. Para eso están los canales. Los receptores modernos tienen entre 300 y 500 canales. Básicamente, un solo canal puede procesar una sola frecuencia de un solo satélite, por lo que cuantos más canales tenga su receptor, mejor.
Sin embargo, muchos fabricantes utilizan esto como una técnica de marketing en la actualidad. Se ven receptores con más de 800 canales porque, sí, cuantos más canales, mejor. Pero, solo hay una cierta cantidad de satélites en el cielo y cuando se reduce a los satélites reales dentro de su diagrama de cielo que puede utilizar, el número se vuelve aún más pequeño.
En términos generales, tener un receptor con alrededor de 250 y 400 canales es más que suficiente. No caiga en la trampa de tener un gran número de canales pensando en futuros lanzamientos de satélites porque, honestamente, cuando alcance la cantidad máxima de canales, deberá considerar reemplazar su equipo de todos modos, ya que la tecnología mejora rápidamente año tras año.
4: Datos de corrección
Para que comprenda las diferencias de precisión entre los dispositivos, puede consultar la comparación a continuación:
Aa: GPS para teléfono móvil: precisión de 15 a 20 metros
Bb: GNSS autónomo: precisión de 1 a 5 metros
Cc: GNSS corregido por SBAS: precisión de 0,5 a 1 metro
Dd: GNSS corregido de banda L: de 5 a 10 centímetros
Ee: GNSS corregido RTK: 1 a 2 centímetros
Los satélites de posicionamiento que todos usamos están en órbita alrededor de nuestro planeta y, como están orbitando en el espacio, hay algunos problemas con los que debemos lidiar. Estos son:
A: interferencias atmosféricas
B: errores de sincronización
C: Errores en los datos de efemérides
A: Interferencias atmosféricas
Dado que los satélites de posicionamiento que utilizamos están en órbita, las señales que transmiten tendrán que pasar por nuestra ionosfera y troposfera. La ionosfera está cargada eléctricamente, lo que produce una interferencia en la señal.
La interferencia en esta capa depende de la actividad solar, la época del año, la hora del día y la ubicación. La troposfera es la más cercana a la Tierra y las interferencias en la señal dependen de la temperatura, la densidad, la presión y la humedad. Todos estos factores hacen que sea realmente difícil predecirla.
B: Errores de sincronización
La precisión de la sincronización es fundamental para la precisión del GNSS y la mayoría de las veces se olvida. Incluso con los relojes atómicos más avanzados a bordo de los satélites, las diferencias más pequeñas pueden tener un gran impacto.
Dado que los satélites orbitan a una altura de unos 25.000 kilómetros, un pequeño error de sincronización de 5 ns puede generar una desviación de alrededor de 1,5 metros en la precisión.
C: Error en los datos de efemérides
Este error es básicamente la diferencia entre la posición real del satélite y la posición esperada. Dado que el receptor GNSS utiliza la posición del satélite para calcular la suya propia, pequeños errores orbitales pueden afectar la precisión de la antena GNSS.
Ahora que comprende un poco más cómo funciona el GNSS y de dónde provienen las diferencias en el rendimiento, es bueno saber qué impacto tiene su entorno en su receptor. El sector en el que se desempeña también influye mucho en el tipo de receptor que podría querer utilizar.

Un factor importante en esto se llama «interferencias por trayectos múltiples».
¿Qué son los errores de trayectos múltiples? Los errores de trayectos múltiples son interferencias de objetos cercanos como árboles, vallas, edificios e incluso de usted mismo.
El GNSS proporciona una referencia de tiempo de alta precisión y se utiliza ampliamente en sistemas de sincronización de tiempo. Los servicios de tiempo basados en receptores GNSS y otros sensores se adoptan ampliamente en sistemas de integración y la sincronización de tiempo entre diferentes dispositivos es crucial.
Debido a que la señal de pulso por segundo (PPS) de un receptor GNSS tiene alta precisión y estabilidad a largo plazo, se ha utilizado ampliamente en cronometraje y sincronización de tiempo. Usando relojes atómicos de alta precisión como fuentes de frecuencia estándar, la estabilidad y disponibilidad de señales PPS se pueden probar y evaluar.
También influye la combinación del receptor y la estación base (CORS). Al momento de la sincronización existen varios factores a considerar. Le comparto el testimonio sobre este tema del Agrimensor Robert Wilson Rodríguez, citó: La información que manejo en ese sentido es que el receptor cuando está en modo autónomo rastrea todos los satélites qué le sean visibles en el cielo desde su ubicación en tierra; sin embargo, luego que se vincula a una CORS vía Internet u otro receptor vía Radio entonces el software de campo hace una especie de filtrado en la cual solamente toma en cuenta los satélites qué permitan tener una mejor solución matemática tomando en cuenta su ubicación, inclinación con respecto al receptor, factores atmosféricos, etc.
Una determinación de posición GNSS es similar a una resección de distancia. La geometría del satélite afecta directamente la calidad de la solución de posición estimada por el receptor. El Sistema Global de Navegación por Satélite (GNSS) está diseñado de modo que al menos cinco satélites estén sobre el horizonte local en todo momento.
Muchas veces a lo largo del día, hasta ocho o más satélites pueden estar sobre el horizonte. Debido a que los satélites están en órbita, la geometría del satélite cambia durante el día, pero se repite día a día.
Se requieren un mínimo de cuatro satélites para estimar la ubicación y el tiempo del usuario. Si se rastrean más de cuatro satélites, se realiza una solución sobre determinada y se puede medir la confiabilidad de la solución. Cuantos más satélites se utilicen, mayor será la calidad e integridad de la solución.
La dilución de la precisión de la posición (PDOP) proporciona una medida de la geometría predominante del satélite. Los valores bajos de PDOP, en el rango de 4,0 o menos, indican una buena geometría del satélite, mientras que un PDOP mayor de 7,0 indica que la geometría del satélite es débil.
La máscara de elevación evita que el receptor utilice satélites que se encuentran bajos en el horizonte. Los errores atmosféricos y la propagación por trayectorias múltiples de la señal son mayores en el caso de satélites de baja elevación.
En lugar de intentar utilizar todos los satélites a la vista, el receptor utiliza una máscara de elevación predeterminada de 10 grados. Si se utiliza una máscara de elevación más baja, el rendimiento del sistema puede verse afectado.
El rango operativo se refiere a la separación máxima entre la base y el sitio móvil. A menudo, las características del enlace de datos determinan el rango operativo RTK. No existe un límite máximo para la longitud de la línea base para RTK con el receptor, pero la precisión se degrada y el tiempo de inicialización aumenta con la distancia desde la base.
Las especificaciones dadas para los receptores especifican la distancia dentro de la cual esas especificaciones son válidas, y no se dan especificaciones más allá de ese rango.
Las coordenadas 3D de la posición del receptor GPS y el error del reloj del receptor pueden estimarse basándose en el concepto de trilateración siempre que al menos cuatro satélites GPS sean rastreados simultáneamente por el receptor GPS. La trilateración es un método geométrico utilizado para determinar la ubicación de un punto utilizando la geometría de esferas basada en mediciones de distancia.
Las señales enviadas por ondas de radio desde los satélites GNSS tienen codificadas marcas de tiempo (y otra información) extremadamente precisas. Esto es posible gracias al uso de relojes atómicos increíblemente precisos (y de muy alto costo) a bordo de cada satélite.
Una vez que el receptor GNSS ha determinado su posición (y esto es un requisito), el receptor GNSS sincroniza su reloj interno (mucho menos preciso) con los relojes del satélite. Al mantener esa sincronización, se considera que el reloj del receptor GNSS tiene una fuente de tiempo muy precisa.
Muchas industrias dependen en gran medida de estos relojes basados en receptores GNSS de alta precisión, incluidos los bancos, las bolsas de valores, las empresas de telecomunicaciones y los proveedores de electricidad.
Los relojes electrónicos controlan funciones críticas en muchas aplicaciones. Sin embargo, los relojes suelen estar diseñados para ahorrar costos en lugar de para mantener la hora exacta.
Incluso los relojes de computadora bastante precisos pueden variar debido a problemas de fabricación, cambios de temperatura, interferencias eléctricas y magnéticas, la antigüedad del cristal de cuarzo o incluso la carga del sistema.

Relojes atómicos
Los relojes sincronizados con patrones atómicos son cronometradores mucho más estables. Los relojes máser de rubidio, cesio e hidrógeno son muy precisos.
De los tres, los relojes de rubidio suelen ofrecer la mejor combinación de costo, tamaño y rendimiento general, y suelen ser un requisito para sistemas de reloj maestro altamente confiables.
Sin embargo, los relojes atómicos por sí mismos no garantizan la trazabilidad y la sincronización con otros relojes. Ahí es donde entra en juego el GPS/GNSS.
Los satélites GPS/GNSS incluyen tres o cuatro relojes atómicos que son monitoreados y controlados para que estén altamente sincronizados y sean rastreables según estándares nacionales e internacionales (conocidos como Tiempo Universal Coordinado o UTC).
Para la sincronización, la señal GNSS se recibe, se procesa mediante un reloj maestro local, un servidor de tiempo o una referencia primaria y se transmite a dispositivos, sistemas o redes posteriores para que sus relojes locales también estén sincronizados con la hora UTC.
Las precisiones típicas varían desde mejores de 1 microsegundo hasta algunos milisegundos, según el protocolo de sincronización.
Es el proceso de sincronización con GNSS el que puede proporcionar la precisión de un reloj atómico sin la necesidad de un reloj atómico local.
Aun así, los relojes atómicos locales a veces se desean como una solución de respaldo a largo plazo en caso de una pérdida de señal GNSS, como una interrupción relacionada con el clima, interferencia de señal u otros escenarios como interferencias o suplantación.
En cualquier caso, la sincronización del reloj GNSS elimina la necesidad de configurarlo manualmente (un proceso propenso a errores) para establecer la trazabilidad con respecto a las normas nacionales e internacionales.
Esto permite correlacionar diversos eventos incluso si están marcados con la hora en relojes diferentes. Los beneficios son numerosos e incluyen:
1: Marcas de tiempo legalmente rastreables/validadas
2: Cumplimiento normativo
3: Redes seguras
4: Eficiencia operacional.
Como hemos podido comprobar, existe todo un engranaje en el funcionamiento de los equipos GNSS, todo un sistema integrado o combinado para su funcionamiento, con conceptos básicos y prácticos que facilitan su comprensión, conocerlo a fondo es un gran reto para el colectivo, desglosar cada componente que lo integra facilita un mejor abordaje sobre este importante tema.
Feliz y bendecido inicio de semana, éxitos en todo, grandes bendiciones.
La búsqueda de la espiritualidad no es un beneficio añadido a nuestra vida, algo en lo que te embarcas si tienes tiempo e inclinación. Somos seres espirituales en un viaje terrenal. Nuestra espiritualidad construye nuestro ser
Una profunda reflexión de John Bradshaw que invita al lector a reflexionar.